Pozisyonè servo 2 aks pou chay lou

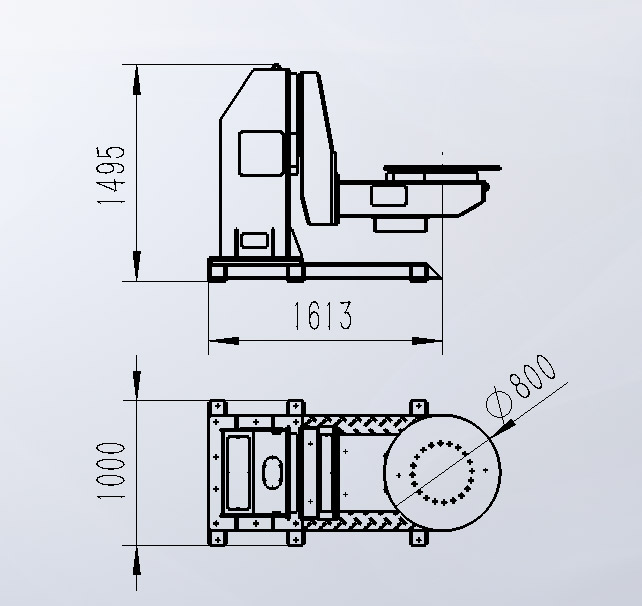
Dimansyon pozisyonè
Deskripsyon
- Kijan pozisyonè L 2 aks sa a deplase?
1 aks ka Thorne 360° orizontalman, lòt aks la ka baskile 360° agoch ak adwat
Pozisyonè soude a nòmalman konpoze de yon mekanis wotasyon tab travay la ak yon mekanis wotasyon, ki pèmèt pyès travay la fiks sou tab travay la nan ang soude oswa ajisteman ki nesesè a grasa leve, wotasyon ak wotasyon tab travay la.
- Kijan pozisyonè a fonksyone?
Seri pozisyonè soude yo se kalite baskile bò, kalite wotasyon tèt ak ke, kalite wotasyon leve tèt ak ke, kalite enkline tèt ak ke ak kalite doub wotasyon, elatriye.
Li ka konpatible ak manipilatè soude pou fòme yon machin soude espesyal otomatik, epi li konpatible tou ak ekipman periferik robo ak robo pou reyalize automatisation soude. Epi nou kapab tou fè pozisyonè soude Customized selon diferan pyès travay kliyan yo ak egzijans teknolojik.
Dyamèt pozisyonè
| Modèl | JHY4030L-080 |
| Vòltaj Antre Rated | Monofaz 220V, 50/60HZ |
| Klas Izolasyon Motè | F |
| Platin | Dyamèt 800mm (ka Customized) |
| Pwa | Anviwon 400kg |
| Chaj Maksimòm | Chaj Axial ≤300kg / ≤500kg/ ≤1000kg (oubyen >1000kg ka pèsonalize) |
| Repetabilite | ±0.1mm |
| Pozisyon Arè | Nenpòt pozisyon |
Aplikasyon
Pyès oto, pyès bisiklèt, pyès machin, mèb asye, nouvo enèji, estrikti asye, machin konstriksyon, ekipman kapasite fizik, elatriye.
Pwodwi prensipal pozisyonè soude nou an
Pozisyonè soude 1 aks tèt-ke wotasyon tip
Pozisyonè soude vètikal wotasyon 1 aks tèt-stock
Pozisyonè soude orizontal 1 aks
Pozisyonè soude 2 aks tip P
Pozisyonè soude 2 aks tip U
Pozisyonè soude 2 aks tip L
Pozisyonè soude orizontal 3 aks
Pozisyonè soude baskile 3 aks monte-desann
Pakè: Ka an bwa
Tan livrezon: 40 jou apre peman davans lan resevwa
FAQ
1.Q: èske pozisyonè ou a ka travay avèk robo Fanuc mwen an?
A: Wi
2. Èske pozisyonè ou a ka deplase an senkronizasyon ak robo ABB mwen an?
A: Wi, jis enstale motè menm mak ak robo ou a sou pozisyonè a.
3.Q: Ki jan yo kontwole pozisyonè a?
A: Lè w ap itilize robo JHY, sistèm kontwòl robo nou an ka kontwole li; lè w ap itilize yon lòt mak robo, nou ka ekipe pozisyonè a ak yon kabinè PLC pou l travay avèk robo w la.




