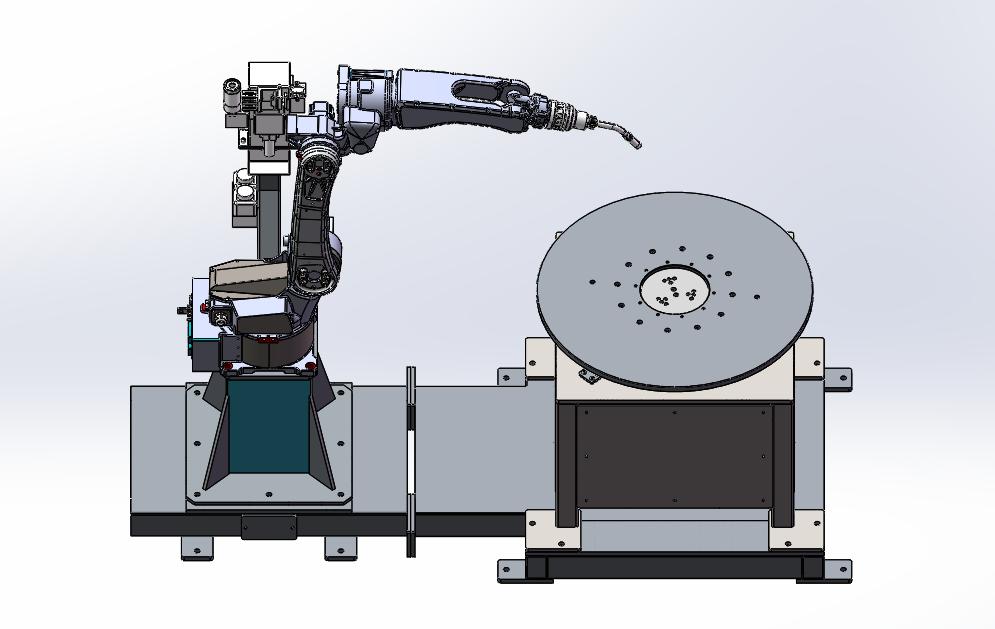
Estasyon travay robotik 6 aks an asye pur pou soude aliminyòm






Karakteristik
1. Konsepsyon kab entegre nan robo a pèmèt robo a deplase san entèferans epi layout estasyon travay la pwòp e byen ranje.
2. Kabinè kontwòl robo a ka kontwole jiska 11 aks, evite debogaj PLC konplèks ak okipasyon espas.
3. Robo JHY a ak pozisyonè a ka senkronize, epi robo a ka soude an menm tan lè pozisyonè a ap vire, sa ki fè estasyon travay sa a patikilyèman apwopriye pou soude sikilè.
4. Yon pakèt ekipman oksilyè disponib, tankou detèktè lazè, rido limyè sekirite ak kloti sekirite.
5. Sistèm kontwòl la gen plizyè pakè pwosesis soude, ki pèmèt diferan mòd soude yo dwe itilize pou diferan pyès travay.
Paramèt teknik pozisyonè a
| Modèl | JHY4030D-080 |
| Vòltaj Antre Rated | Monofaz 220V, 50/60HZ |
| Kals izolasyon motè | F |
| Tab Travay | Dyamèt 800mm (ka Customized) |
| Pwa | Anviwon 400kg |
| Chaj Maksimòm | Chaj Axial ≤300kg / ≤500kg / ≤1000kg (oubyen >1000kg ka pèsonalize) |
| Repetabilite | ±0.1mm |
| Pozisyon Arè | Nenpòt pozisyon |
Konpozan estasyon travay robo
1. Robo soude:
Kalite: Robo soude MIG-BR-1510A, BR-1810A, BR-2010A
Robo soude TIG: BR-1510B, BR-1920B
Robo soude lazè: BR-1410G, BR-1610G
2. Pozisyonè
Modèl: JHY4030D-080
Kalite: Pozisyonè wotasyon orizontal 1 aks
3. Sous pouvwa soude
Kalite: sous pouvwa soude 350A/500A
4. Zam soude
Kalite: zam refwadi ak lè, zam refwadi ak dlo, zam pouse-rale
5. Estasyon netwayaj flanbo:
Modèl: SC220A
Kalite: Netwayaj otomatik pou soude ak flanbo pneumatik
Lòt periferik estasyon travay robo
1. Robo k ap deplase ray
Modèl: JHY6050A-030
2. Capteur lazè (opsyonèl)
Fonksyon: swiv soude, pozisyonman.
3. Rido limyè sekirite (opsyonèl)
Distans pwoteksyon: 0.1-2m, 0.1-5m; wotè pwoteksyon: 140-3180mm
4. Kloti sekirite (opsyonèl)
5. Kabinè PLC (opsyonèl)





